
Les chercheurs ont développé un nouveau type de «peau» électronique qui peut offrir aux robots la capacité de «ressentir» différentes sensations tactiles humaines, telles que les perforations, les changements de température et même la sensation d'être poignardé.
Des spécialistes de l'Université de Cambridge et du University College de Londres (UCL), au Royaume-Uni, ont présenté un matériau unique, bon marché et durable, qui peut fondre et modeler sous des formes complexes, aborder la perception robotique au sens du toucher humain. Ce type d'interfaces, appelé haptique, est la prochaine étape technologique qui est nécessaire pour que les robots obtiennent une plus grande empathie envers les gens.
Approche multimodale
Alors que les solutions conventionnelles utilisent différents capteurs pour détecter la pression, la température ou la douleur, la nouvelle peau électronique est composée d'une seule couche de hydrogel conducteur. Grâce à ses propriétés flexibles, le matériau se comporte comme un capteur intégral: toute la surface fonctionne comme une zone sensible, très similaire à la peau biologique.
Grâce à des techniques de tomographie par impédance électrique (EIT), l'équipe de scientifiques et d'ingénieurs a accédé à plus de 860 000 chemins de conduction électrique dans l'hydrogel utilisé. En appliquant seulement 32 électrodes placées à la base de la main robotique, ils ont collecté plus que 1,7 million de données en un seul gestepermettant de reconnaître les touches légères, les changements de température ou même les crucurs.
Selon un communiqué de presse, pour interpréter ces informations qu'ils ont utilisées algorithmes d'apprentissage automatique. Ces modèles leur ont permis d'identifier lesquelles des voies conductrices fournissent les données les plus pertinentes pour chaque type de stimulus, optimisant par conséquent les performances sensorielles et la réduction du «bruit» ou de l'interférence inhérente dans les systèmes multimodaux.
Applications variées et sensibilité éprouvée
Dans la nouvelle étude, publiée dans la revue Science Robotics, les chercheurs précisent que la peau électronique reconnaît au moins Six types de stimuli différents: Contact humain, coupure ou coup de couteau, pulsations isolées, pulsations multiples et variations de température locales. Cette approche « structure d'informations multimodales » permet d'obtenir une perception efficace dans un seul composant.
Référence
Structuration d'informations multimodales avec des peaux molles à couche unique et une tomographie à impédance électrique à haute densité. David Hardman et al. Science Robotics (2025). Doi: https: //doi.org/10.1126/smirobotics.adq2303
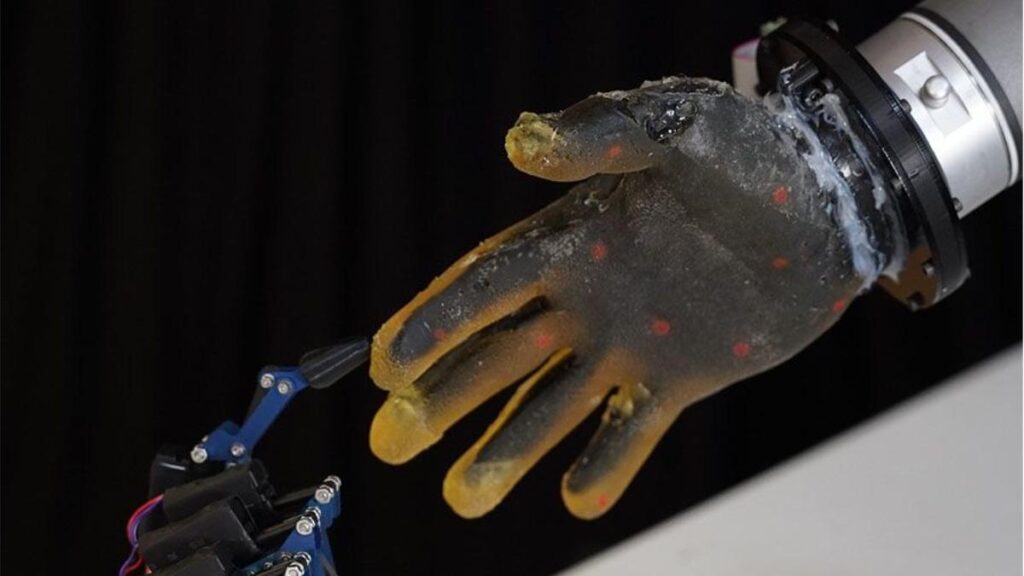
Dans une expérience menée dans le but de vérifier la polyvalence de la nouvelle approche, ils ont mélangé l'hydrogel sur la forme et la taille d'un main humaine adulte. Avec des données structurées, la main robotique a non seulement réussi à prédire les conditions environnementales et à localiser les touches humaines, mais a en même temps produit des informations propioceptives, c'est-à-dire des données sur sa propre position et son mouvement.
Le possible Champs d'application Ils sont très étendus: ils couvrent des prothèses avec une sensibilité tactile et des robots humanoïdes qui interagissent en toute sécurité avec les gens aux appareils de l'industrie automobile. Même les progrès peuvent viser les tâches de sauvetage des catastrophes ou des urgences, des situations dans lesquelles la température et la détection de pression peuvent faire une différence et sauver des vies humaines.